









+
+ )}
+
+ {s.eyebrow && {s.eyebrow}}
+
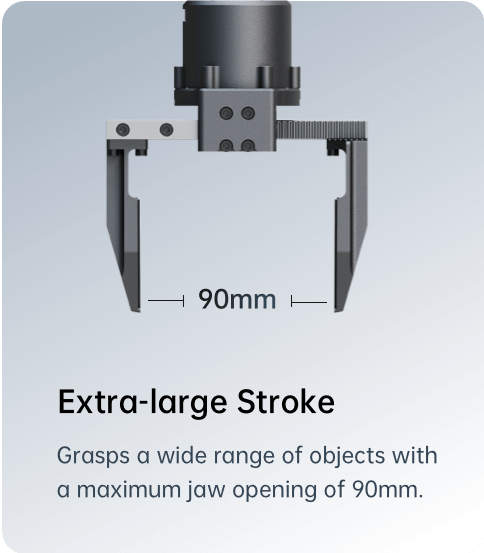
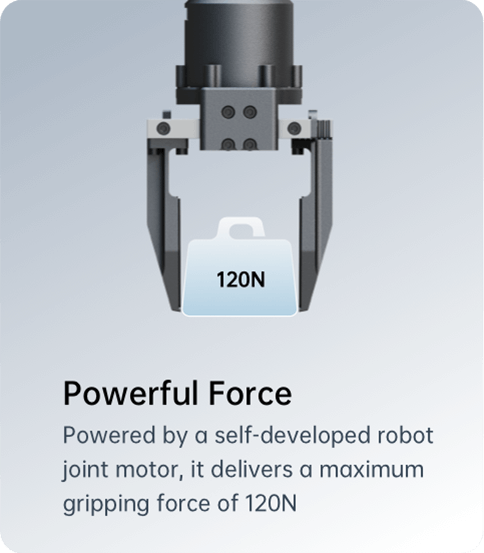
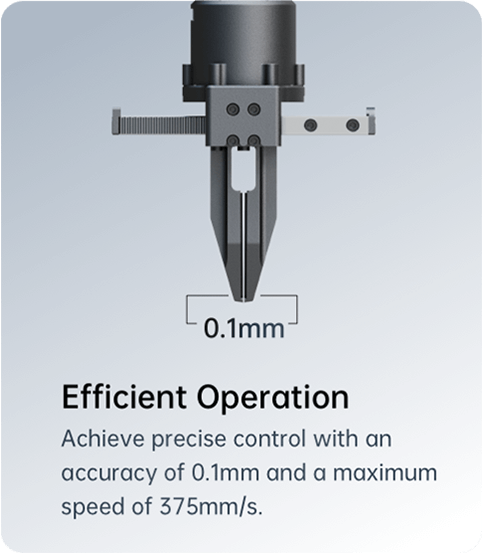
+ {s.title}
+{s.body}
+ {s.bullets && s.bullets.length > 0 && ( +-
+ {s.bullets.map((b) => (
+
-
+
+ {b} +
+ ))}
+